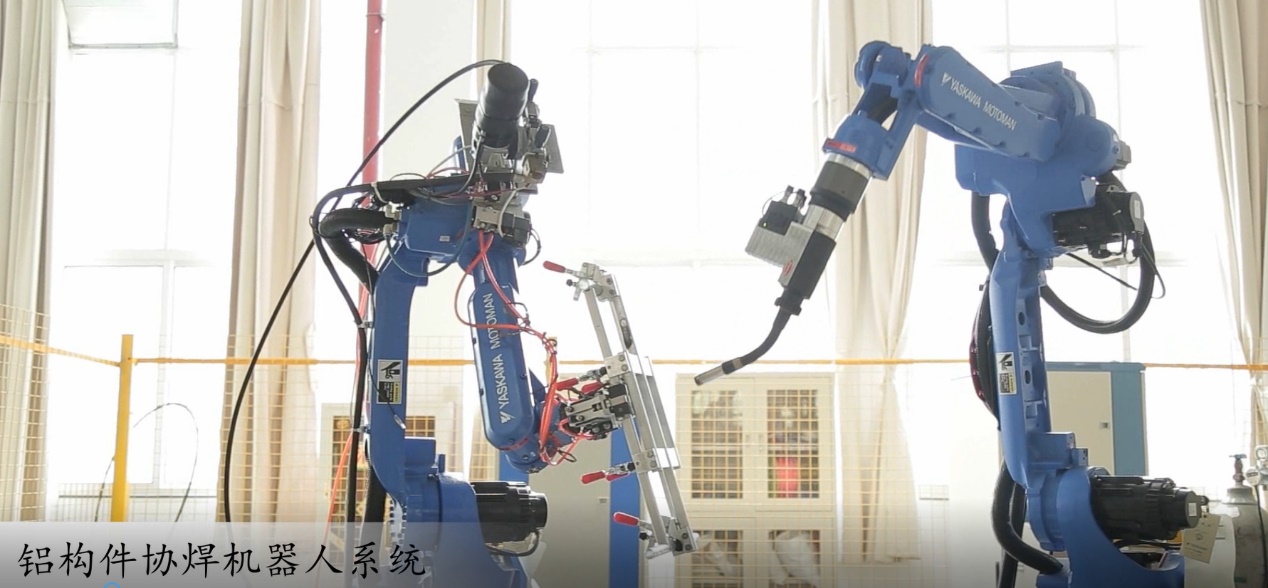
常州中进医疗器材股份有限公司因业务和发展需求,急需实现7000系列铝构件焊接自动化,尝试国内外多种设备和工艺、寻求国外技术支持,均未如愿。为此,工业机器人技术专业群科研团队,针对企业困惑,依托“科技部机器人及智能装备技术应用中心”、“江苏省中小企业智能装备技术公共技术服务平台”等平台,一举突破7000系列铝构件机器人自动化焊接技术瓶颈。本系统是针对7000系列航空铝构建焊接设计的全自动化焊接系统,通过分段自适应焊接工艺技术和纠偏式焊缝跟踪技术,可实现焊缝熔深、缝宽、凸度等参数的高度可控,降低工业现场焊接对专业技术人员的依赖,有效解决传统焊接工艺中的热量聚集、工件变形、焊缝烧穿以及一致性差等问题,打破国内航空铝构件自动焊接难的壁垒,助力企业快速发展,此项目获得江苏省高等学校科学技术研究成果奖,相关研发技术应用到企业新增利润达2230.41万元。
核心技术:分段自适应焊接工艺技术解决航空铝管管壁薄、导热快、焊接易变形等问题。以7000系列铝合金焊管及5000系列焊丝为研究对象,融合远红外测温、激光测距、视觉等传感器构建焊管温度、焊管几何参数、焊缝结构等状态参数感知系统,并融合专业技术人员焊接经验,建立能智能管控的状态空间数学描述模型。基于福尼斯焊机丰富的可调整程序资源,通过数值分析方法拟合不同状态参数条件下的焊接曲线,编制焊接子程序(JOB)库,分段实现焊接工艺参数随状态参数变化而智能化调整,从而实现分段自适应焊接。
核心技术:纠偏式焊缝跟踪技术解决自动精准焊接问题。考虑受热变形、重复定位误差等因素的影响,项目开发了纠偏式焊缝跟踪技术。系统由示教编程方式设定焊枪运行轨迹,同时设定焊缝与焊枪间相对位置参数的允许偏离值。重复焊接作业时,由固定于焊枪并随焊枪运动的激光检测系统按三个不同方位(一般取120o角度差)进行距离测量,从而确定焊缝与焊枪间的相对位置偏离值,一旦超过设定允许偏离值,则焊接机器人对示教轨迹自动进行纠偏调整,使焊枪在整个焊接过程中与焊缝保持合理的相对距离。

